一、团队介绍
武汉科技大学新一代协作机器人团队是一个包含控制科学与工程、机械工程、计算机科学与技术等多学科研究人员的交叉研究团队,是国内最早从事模块化协作机器人研究的团队之一。主要研究方向有协作机器人本体技术、机器智能、多模态人机交互、目标识别、同时定位与制图等,在智能机器人、工业机器人等研究领域开展了深入的研究。团队先后承担了二十余项国家自然科学基金、“863”重点项目、数控重大专项、国家科技支撑计划、“十三五”国家重点研发计划“智能机器人”专项等课题。
二、团队成员简介
(1) 团队负责人

闵华松,男,博士,二级教授,博士生导师,武汉科技大学机器人与智能系统研究院院长。博士毕业于武汉大学,北京航空航天大学机器人所博士后出站。863 先进制造领域、国家自然科学基金、博士后基金评审专家,“十三五”国家重点研发计划“智能机器人”及“网络协同制造与智能工厂”专项评审专家,任中国人工智能学会认知系统与信息处理专业委员会常务委员,中国电子学会嵌入式系统与机器人分会委员,中国机械工程学会机器人分会委员,中国协作机器人标准化工作组副组长。主持多项国家自然科学基金、“十三五”科技部“智能机器人”重点研发计划课题、“863”重点项目、数控重大专项、科技支撑计划等国家级项目。
(2) 团队成员
 左韬,男,博士,副教授,硕士生导师。美国田纳西大学访问学者。研究方向为目标跟踪与信息融合、机器人、无线通信、嵌入式系统。获授权发明专利1项,实用新型专利4项,发表学术论文50余篇,其中SCI收录8篇,EI收录30余篇。主持完成教育厅基金1项,开放基金4项,横向项目3项,参与省部级以上科研项目6项。
左韬,男,博士,副教授,硕士生导师。美国田纳西大学访问学者。研究方向为目标跟踪与信息融合、机器人、无线通信、嵌入式系统。获授权发明专利1项,实用新型专利4项,发表学术论文50余篇,其中SCI收录8篇,EI收录30余篇。主持完成教育厅基金1项,开放基金4项,横向项目3项,参与省部级以上科研项目6项。
 王少威,男,博士,副教授。美国阿拉巴马大学访问学者。研究方向为电机运行与控制、机械臂运动规划与控制。发表论文20余篇,其中SCI/EI收录论文10余篇,主持和参与各类项目10余项。
王少威,男,博士,副教授。美国阿拉巴马大学访问学者。研究方向为电机运行与控制、机械臂运动规划与控制。发表论文20余篇,其中SCI/EI收录论文10余篇,主持和参与各类项目10余项。
 邓春华,男,博士,副教授,硕士生导师。主要研究方向为机器视觉、模式识别、机器学习。主持国家自然科学基金1项,教育部科研项目、湖北省自然科学基金项目和湖北省教育厅中青年基金项目各1项;先后在IEEE Transactions on Aerospace and Electronic Systems,IEEE Signal Processing Letters等国际期刊和会议上发表论文20余篇,其中SCI检索5篇,EI收录10余篇
邓春华,男,博士,副教授,硕士生导师。主要研究方向为机器视觉、模式识别、机器学习。主持国家自然科学基金1项,教育部科研项目、湖北省自然科学基金项目和湖北省教育厅中青年基金项目各1项;先后在IEEE Transactions on Aerospace and Electronic Systems,IEEE Signal Processing Letters等国际期刊和会议上发表论文20余篇,其中SCI检索5篇,EI收录10余篇
 林云汉,男,博士,副教授,硕士生导师。主要研究方向为智能机器人感知、多模态推理与操作。主持和参与项目十余项;作为ISO/TC184/SC2/WG10工作组“国际机器人模块化研究组”专家组成员,参与编写“机器人模块化国际标准草案”。带领学生参加“挑战杯”比赛、“国际仿人机器人奥林匹克大赛”、“中国服务机器人大赛”等比赛,获得特等奖、一等奖多项。以第一作者或通讯作者已发表包含IEEE Trans.在内的论文二十余篇,其中,SCI/EI收录论文十余篇。
林云汉,男,博士,副教授,硕士生导师。主要研究方向为智能机器人感知、多模态推理与操作。主持和参与项目十余项;作为ISO/TC184/SC2/WG10工作组“国际机器人模块化研究组”专家组成员,参与编写“机器人模块化国际标准草案”。带领学生参加“挑战杯”比赛、“国际仿人机器人奥林匹克大赛”、“中国服务机器人大赛”等比赛,获得特等奖、一等奖多项。以第一作者或通讯作者已发表包含IEEE Trans.在内的论文二十余篇,其中,SCI/EI收录论文十余篇。
二、研究兴趣
• 嵌入式系统(Embedded System)
• 智能机器人(Intelligent Robotics)
• 同步定位与制图(Simultaneous Localization And Mapping)
• 三维视觉感知(3D visual perception)
• 计算机视觉(Computer vision)
• 路径规划(Path planning)
• 人-机器人交互(Human-robot Interaction)
• 机器人自动作业(Robot automatic operation)
• 智能推理机器人(Intelligent reasoning robot)
• 协作机器人(Collaborative robot)
• 机器人运动学与动力学(Robot Kinematics & Dynamics)
三、科研条件
1、机器人技术实训平台
这是一款面向教育培训领域的机器人技术实训平台,可以用来进行机械臂操作的基本教学,包括拖动示教、脚本语言编程、项目规划等,支持的实验内容囊括了目前工业生产中的大部分基本操作,如码垛、点焊、流水线操作、轨迹规划、末端执行器自动更换等。平台还具有灵活的扩展接口,可以根据实际应用需求进行定制开发与集成。


图1 机器人技术实训平台
2、模块化关节测试平台
模块化关节测试平台主要用于帮助开发人员和研究人员快速的了解模块化关节的工作原理,以及快速的进行设计与开发。
通过双编码器以及高精度的电流检测来实现对无刷直流电机速度、位置、转矩的控制。然后,结合转矩传感器以及磁粉制动器共同组成单关节转矩测试环境。最后,利用高性能伺服板,搭载复杂的控制算法,提高了关节实验平台的适用性和可扩展性。
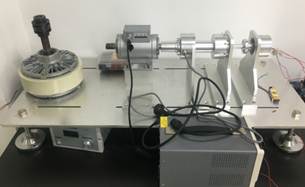
图2 模块化关节测试平台
3、书法机器人
书法机器人系统可以完美的复现各种书法字体。根据我们提出的笔画提取算法自动分析书法的结构特征和运笔特征,生成机械臂的轨迹参数并由机械臂进行书写。
书法教育专业和人才的匮乏是书法文化传承目前面临的巨大困境。借助于外部设备,使用机械臂来模拟人的书法行为和书法创作研究,是近年来兴起的研究方向。机器人书法作为机器人运动规划的典型应用,目前得到了广泛的关注。书法机器人获取合适的轨迹关键点,通过位姿计算和运动学逆解计算出机械臂的各个关节点,从而模拟出人的书写创作过程,实现书法字符书法。我们的书法机器人不仅可以很好的复现书法汉字,还可以将该系统应用到家具雕刻、钢材打标等领域。

图3 书法机器人
4、移动双臂服务机器人
移动双臂服务机器人由一个2自由度的头部、两个7自由度的机械臂、一个伸缩腰身和一个移动底盘组成。
基于该平台研究了一些前沿关键技术,如基于自然语言的“人-机-环境”深度交互技术、基于行为树模型的机器人自主作业算法、主从双臂协调操作、基于ORB的视觉SLAM等。

图4 移动双臂服务机器人
5、新能源汽车充电机器人
新能源汽车充电机器人,通过 3D 结构光相机实现精确的 三维目标识别与 6D 位姿估计,通过机器人的手眼标定、工具坐 标系标定、坐标系转化以及基于 peg in hole 理论的控制算法,达到在无人值守的场景下,让机器人给新能源汽车自动充电。

图5 新能源汽车充电机器人
6、电容笔测试平台
电容笔测试平台通过机械臂对平板电脑、笔记本电脑等设备的触摸屏进行测试,测试功能包含书写测试、按键测试、连笔测试、压力传感测试等等。
系统大大降低劳动强度,并大幅提高检测精度,可以完全取代人工检测流程。同时系统采用模块化设计方法,后期还可加入视觉识别系统,完成更加复杂的检测。
图6 电容笔测试平台
7、人机环境交互的机器人自动作业系统
本系统将机器人三维环境感知、人-机-环境交互、自动编程等前沿技术集成应用于协作工业机器人的自动作业系统的设计中,设计了一种基于自然语言交互的机器人全自动作业系统。通过设计“规则-场景”的匹配与交互的算法,实现人-机器人-环境的交互,并在用户表达的规则错误或无效时,通过语音引导用户给出正确的规则,在确定规则后通过自动编程与执行算法实现全自动化的作业。

图7 人机环境交互的机器人自动作业系统
8、类人技能学习的移动双臂机器人
随着机器人代替劳动者从事各种工作,要求机器人的操作更拟人化和智能化,机器人从人类演示的运动中进行操作技能的自主模仿学习,模仿学习包含三个阶段:技能演示,技能学习以及技能泛化,通过示教的方式将操作技能特征和任务目标传递给机器人。
本系统技能演示及示教是通过9轴IMU惯性传感器采集演示者动作数据,将演示者的能力转化为模仿者能力的过程,其中关键是运动映射。比如人臂与机械臂有很大的不同,运动映射是将人体动作数据转化为机械臂运动所需要的数据,便可以人体直接遥操作控制机械臂,让机械臂操作更加的拟人化。


(a) 人体遥操作控制机械臂 (b) 技能演示与运动映射
图8 基于示范学习的移动双臂机器人拟人化操作
9、基于肌电信号的灵巧手控制系统
本系统通过在人体前臂放置肌电信号传感器,提取与手部运动相关的表面肌电信号,实现手部运动意图的解码。具体来说,通过信号采集、数据处理、训练模型等步骤,建立人体肌电信号到手部运动的映射,将其用于在线解码手部运动意图并转换为相应的控制指令,应用到五指灵巧手的控制。

图9 肌电信号控制五指灵巧手
目前课题组也正在筹备基于脑电信号的研究工作,包括基于脑电信号的假肢手控制系统设计、肌电信号融合脑电信号的人机接口设计等
更新时间2022-3-28